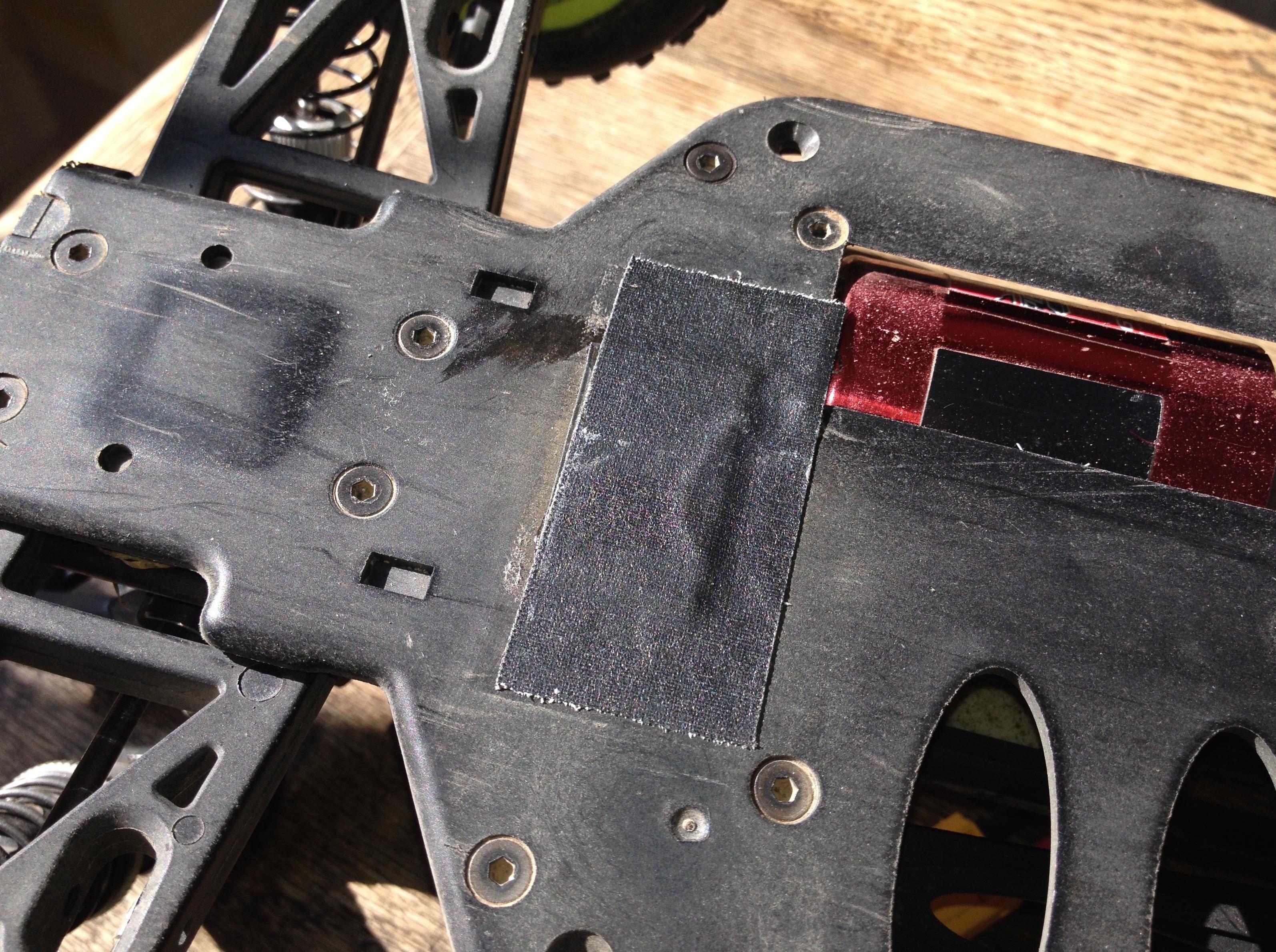
Because the Vandal’s spur gear always drags in the dirt when racing this awesome car it is subject to significant wear. To protect it a little bit from the sand I cut out a tiny piece of plastic that I glued to the bottom of the chassis frame with some CA and then covered it with duct tape. I hope it lasts longer this way.
When I started getting into the hobby and I looked around for transmitters I was really confused with “modes”! What are those modes? Well, it turns out there are two very different things called modes in the R/C hobby.
Transmitter Modes 1 to 4
The first thing to know is that there are different ways to lay out the actual control sticks on a transmitter to control different axis of a model. For people just starting out or getting into model aircrafts I would recommend a transmitter in mode 2. This today is the most common way to lay out the controls. Mode 2 transmitters have the throttle function of the model controlled by the left stick:
A mode 2 transmitter (this one is a FrSky Taranis)
Flight Modes
Flight modes are usually used to help switch between settings in different phases of flight quickly.
Here the TX is switched to stunt mode
This is accomplished by flicking a certain switch.
This is especially helpful for models that need different setups for starting up, regular flight, landing and so forth. With helis for example there is the special situation that the throttle stick not only controls the throttle but at the same time it controls the overall (or collective) pitch of the main rotor blades together. So if you start up the engine of a heli, you need the TX to slowly increase the throttle as you raise the stick. At the same time, the overall collective pitch needs to increase. At some point, usually at around “half stick”, the heli will have enough lift from the pitched blades and the right rpm speed of the motor that it will start to hover.
Once airborne and if you want to do aerobatics with the heli, you need the rpm of the engine to stay at full throttle constantly so you can control all maneuvers with the main rotor’s pitch. That is what a heli’s second flight mode helps to do: it changes the function of the throttle stick in a way that this stick sends out a “full throttle” command at all times, no matter its actual position. It does, however, continue to control the collective pitch of the main rotor blades. When the stick is centered, the blades are at zero pitch, meaning completely level, that is neither generating lift nor pushing the heli down. If pulled down, the throttle stick makes the pitch go negative, if pushed upwards, the collective pitch becomes positive, giving lift to the heli.
I recently sold all end every piece of Spektrum equipment I had and converted all my models to FrSky technology. I really think it’s the best there is! Taranis Homepage
But I still want a transmitter that works for my Blade mCP X, Nano CP X and 130 X helis, so I decided to build my own transmitter module to use in the Taranis’ TX module slot. Out of my old DX4e I extracted the HF module and soldered it into an empty Spektrum case. Now I have true DSMX in my Taranis. To do this I followed this comprehensive article by John Prikkel.
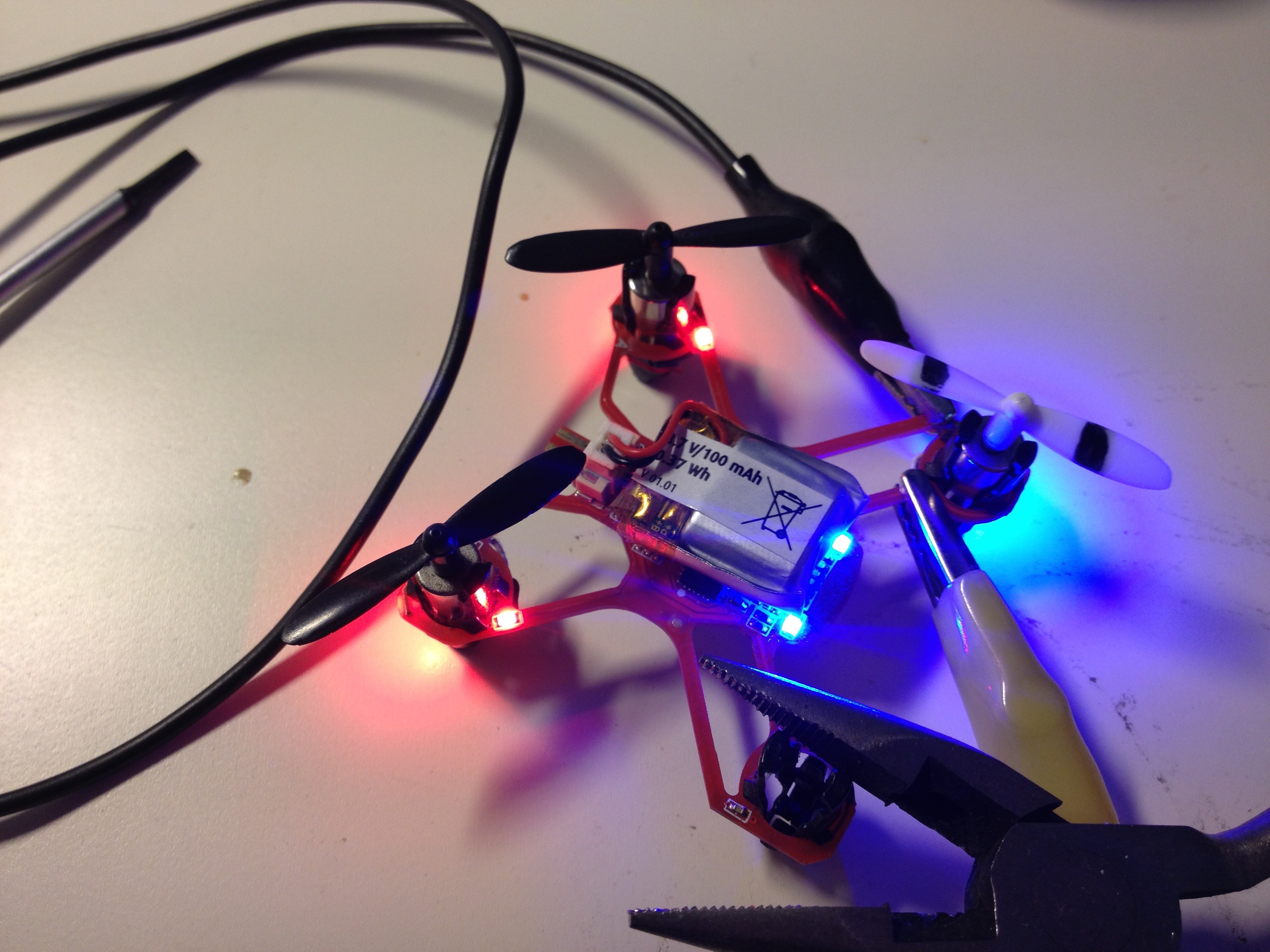
Just out of fun I hooked my tiny little Revell Mini Quad Copter Nano Quad up to the oscilloscope to see at what voltage these little motors are operated. The are obviously driven by a pulse modulated signal of 3.2V peak-to-peak (or whatever the battery can deliver). The pictures show throttle of 0, half and full: