I want to build a counter display that tells me how many people have hit PLAY on my track on SoundCloud in total in all times so far. The idea came to me when I watched Dave’s EEVblog Youtube video of his Nixie Tube subscriber display he made out of his YouTube silver award. Of course for SoundCloud the project has to be tweaked a little.
As I progress I will make new entries in this series of blog posts about the nixie counter display. Click here for a
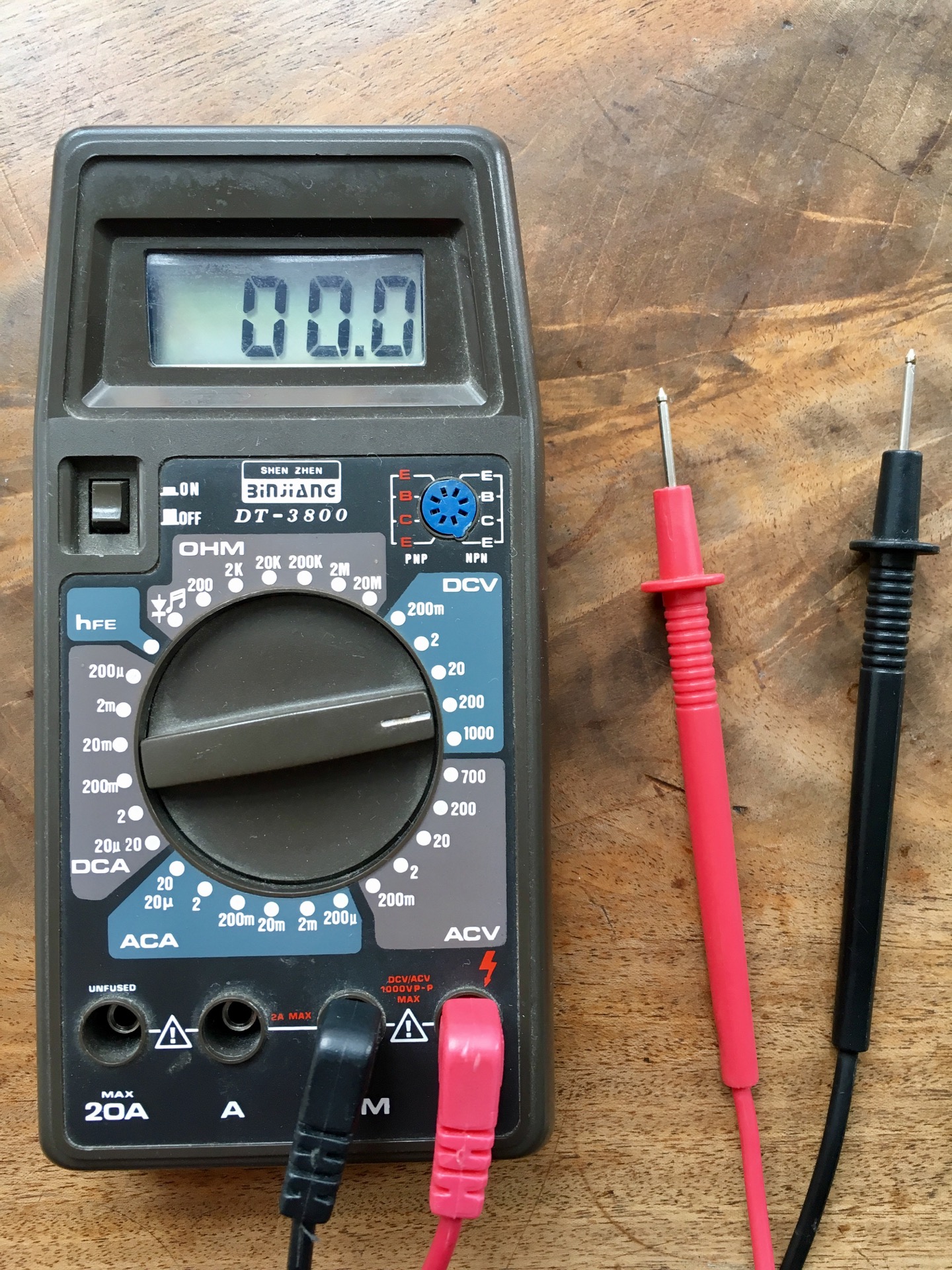
This is my very first multimeter. I bought it in 1990 when I was 14 years old. Back then it cost DM50,- (Deutsche Mark in West Germany). It still works, though I don’t really use it anymore. Its best feature is its instant continuity buzzer.
Today I use a Fluke 177 and the EEVblog multimeter.
My DT-3800 multimeter is still working. Fluke 177 and EEVblog’s Brymen 235
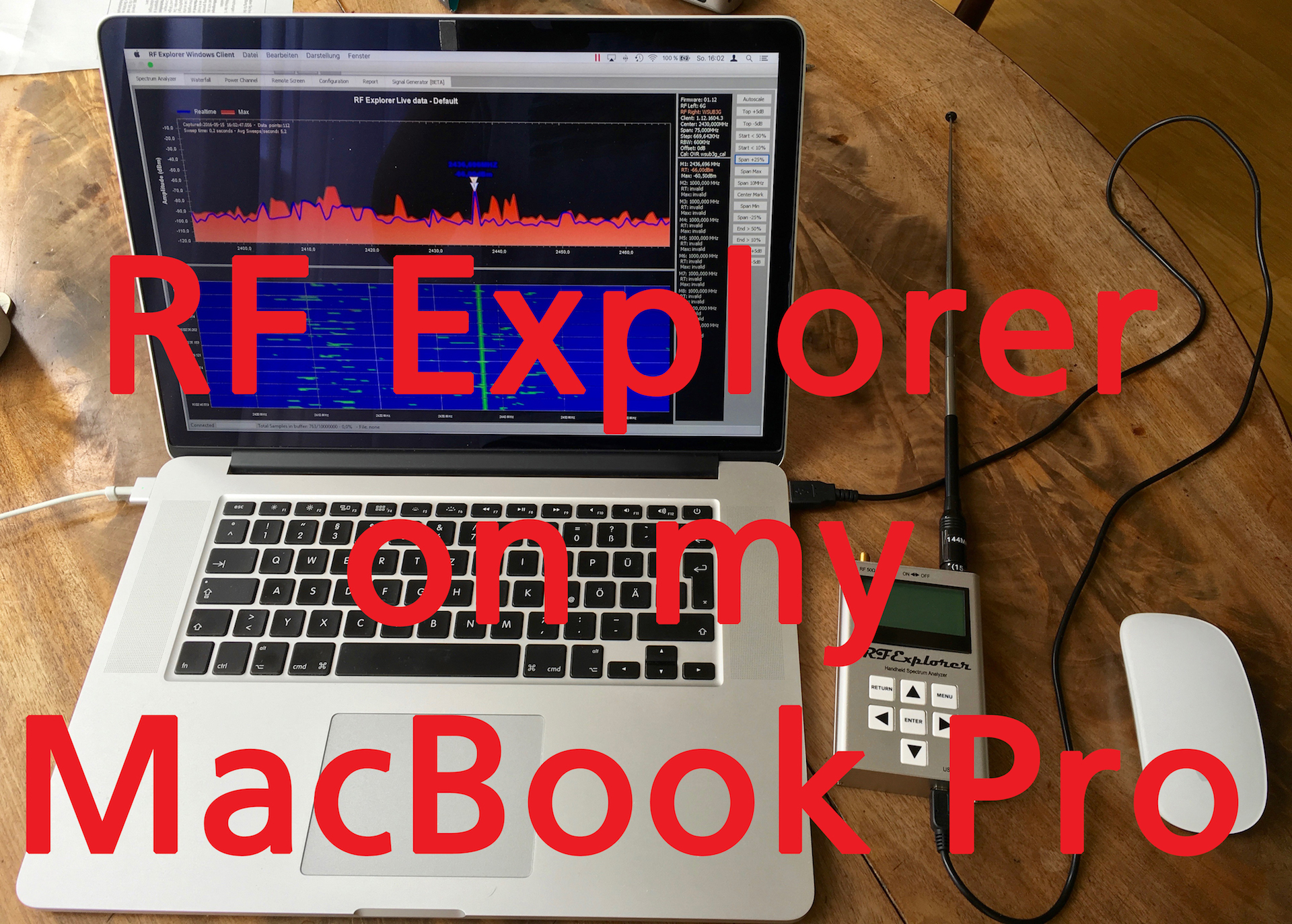
My newest favourite tool is the RF-Explorer 6G combo. I originally bought it to check out the frequemcies for the wireless lav mics I work with as a sound guy on set for tv and movies. But it turns out that the thing is also great for checking 5.8GHz channels when flying FPV with friends.
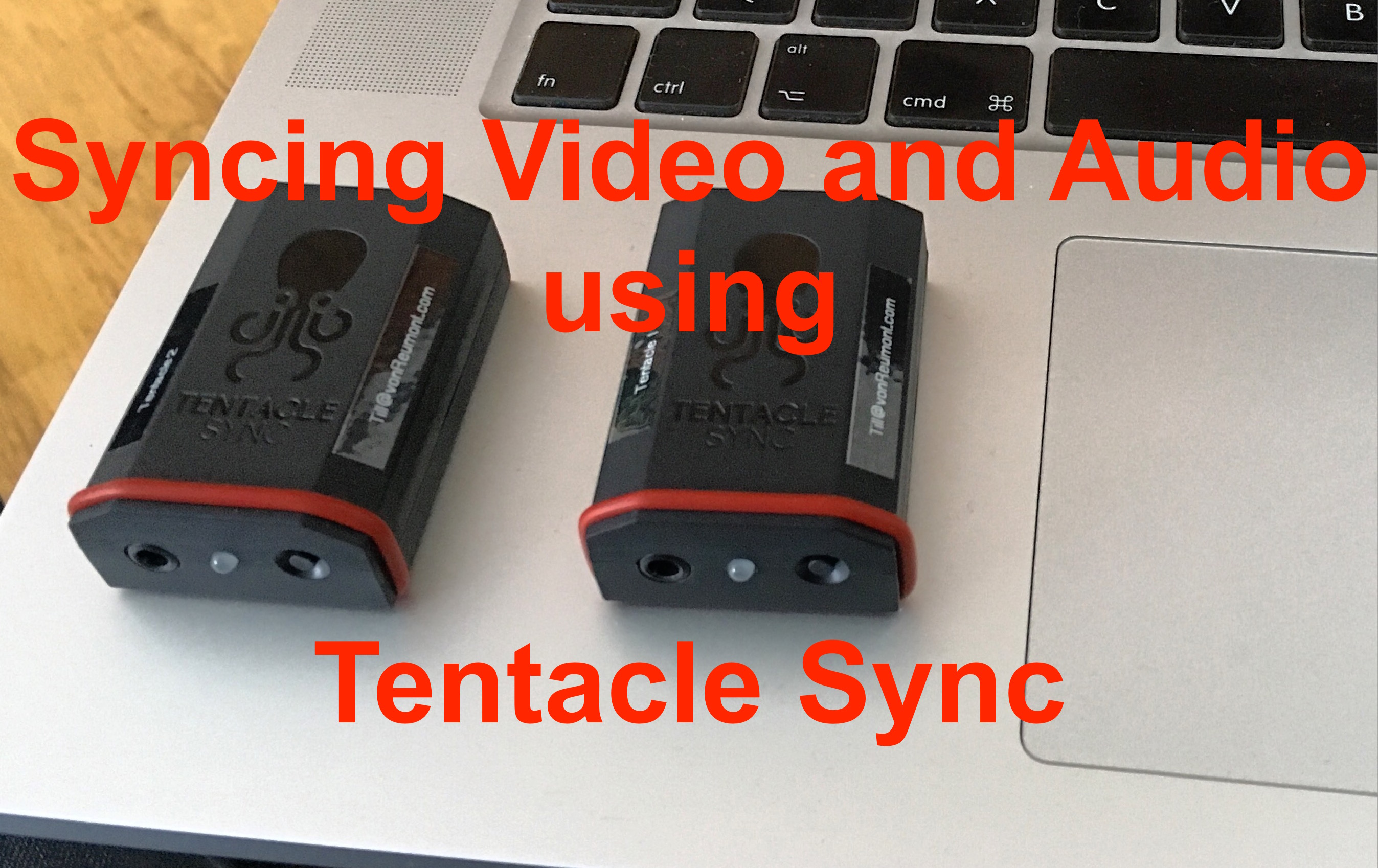
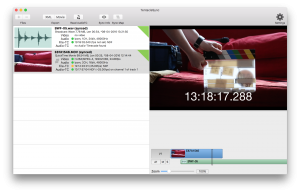
Testing Tentacles to synchronize via Timecode the video files of my Canon 5D Mark III DSLR to the sound files of my Tascam HD-P2 audio recorder. The camera doesn’t have a TC input, so I record it to the mic input on one of the camera’s audio tracks. The HD-P2 however has a real TC input so I set it to slave to the external TC. In Final Cut Pro the two clips couldn’t be made to match, no matter what I tried. Using the Tentacle Sync software supplied with their hardware however it was really quick to export a perfect clip!
Load the Tentacle Software at Tentacle’s Homepage and have a go with my two original files that you can download here:
This year for christmas I built a nice coat rack as a present for my sister. I thought I’d just share the idea. It’s actually really simple. All you need is
a wooden board
some nice-looking hooks
a decorative piece of fabric or a photo that is a little larger than the piece of wood
screws to mount the board on your wall
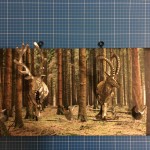
I chose to use a phot that I had taken myself some time ago in the woods and get some decorative hooks that matched the woods theme. Download [download_link link=”http://mixedtinkerings.com/wp-content/uploads/2015/12/Walde-Watermarked.jpg”]my photo[/download_link] if you want to use it.
Simply wrap your wooden board in the piece of cloth or fabric or photo, add some hooks for coats and screw in some loops or lugs so the whole thing can be hung on the wall.
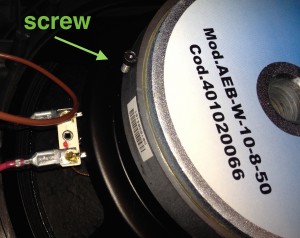
The other day I got my two Opera Live 210 active PA speakers out and I noticed that in one of them only the tweeter was working. Oh no! So I decided to take it apart since it is way too old to be eligible for warranty. I was really surprised how well designed they are! Everything is neat and clean and almost as if they are made to be taken apart. What I found though was’nt that cool: I measured resistance of the speaker coil in the woofer with my multimeter and got an incredibly low .6Ω. Well I guess that means that it is practically shortened, probably in an overload situation. That’s very strange since these speakers are active and have a built-in overload-protection-circuit. I guess it didn’t work so well. ;-( To see if the part of the active amplifier that drives this speaker still works I hooked up my multimeter to its outputs without the woofer being connected. Turning the volume up or down didn’t change the displayed 0V. My guess is that this means that the short in the woofer also killed the amp in the process. That’s really too bad, because I really liked these speakers. They are no longer manufactured.
One funny thing I also found is that some screws had come loose over the years. They are used to mount the OpAmps to a cooling brick. One of those three screws had vanished so I looked around inside the case and I found it: it was clinging to the speaker’s magnet!
Listen to the awful sound of only a tweeter. I recorded the speaker before taking it apart:
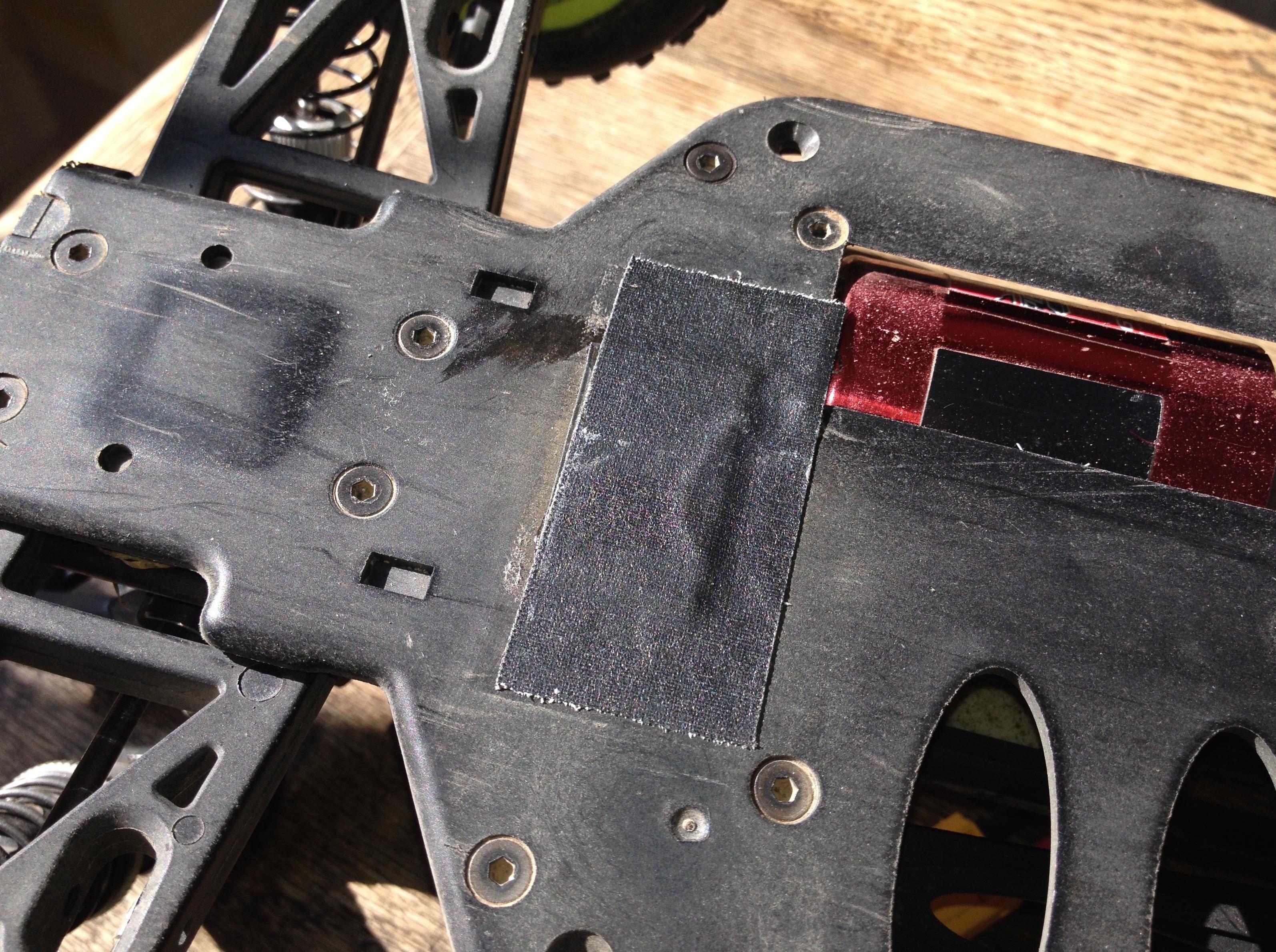
Because the Vandal’s spur gear always drags in the dirt when racing this awesome car it is subject to significant wear. To protect it a little bit from the sand I cut out a tiny piece of plastic that I glued to the bottom of the chassis frame with some CA and then covered it with duct tape. I hope it lasts longer this way.
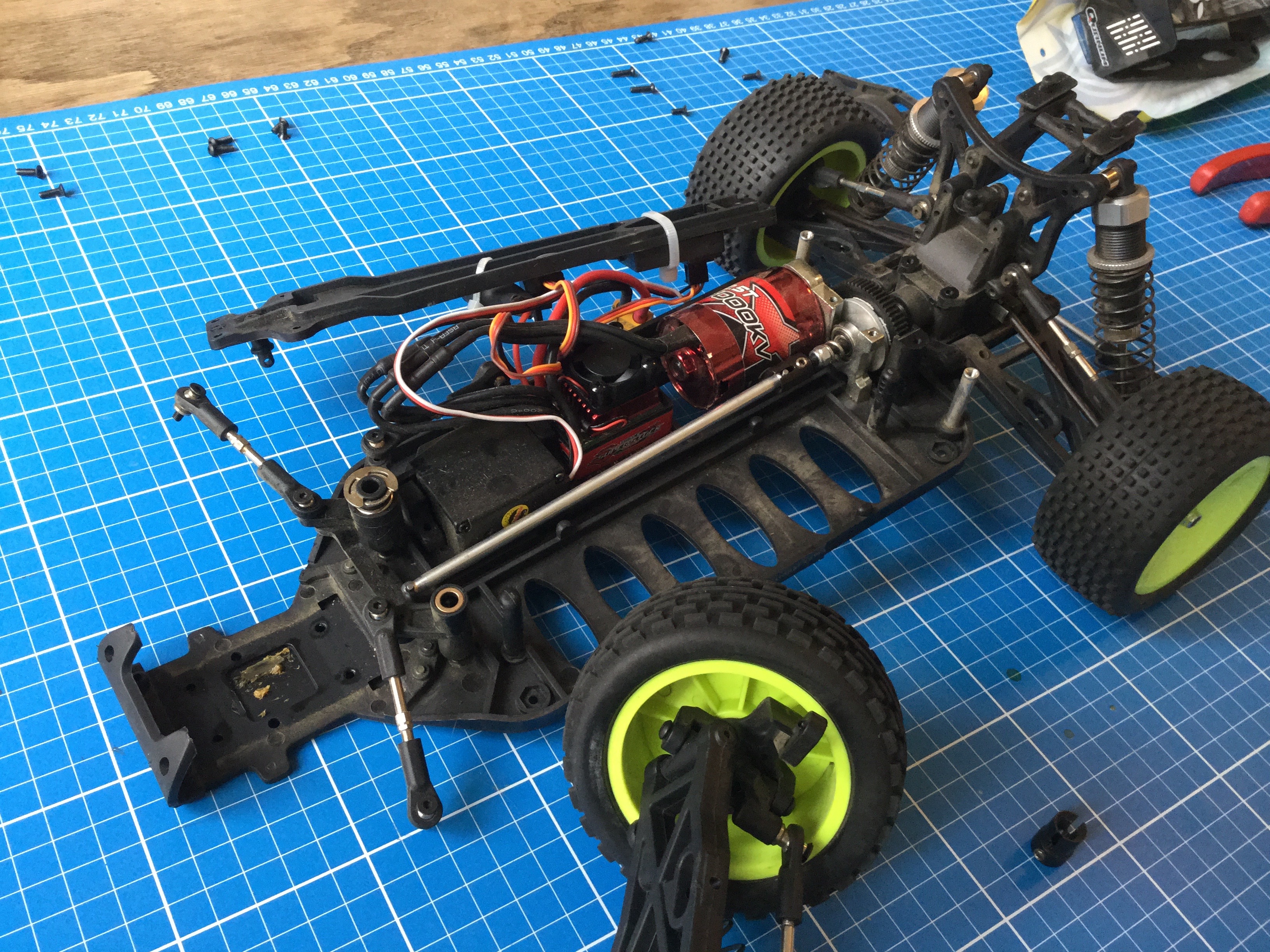
After my first ride with the Vandal yesterday, the front wheels had lost power. I figured something must gone wrong with the front diff. So today I opened up the Vandal and discovered, the screw that holds the drive shaft to the gear box simply had come loose.